سری ربات های جوشکاری


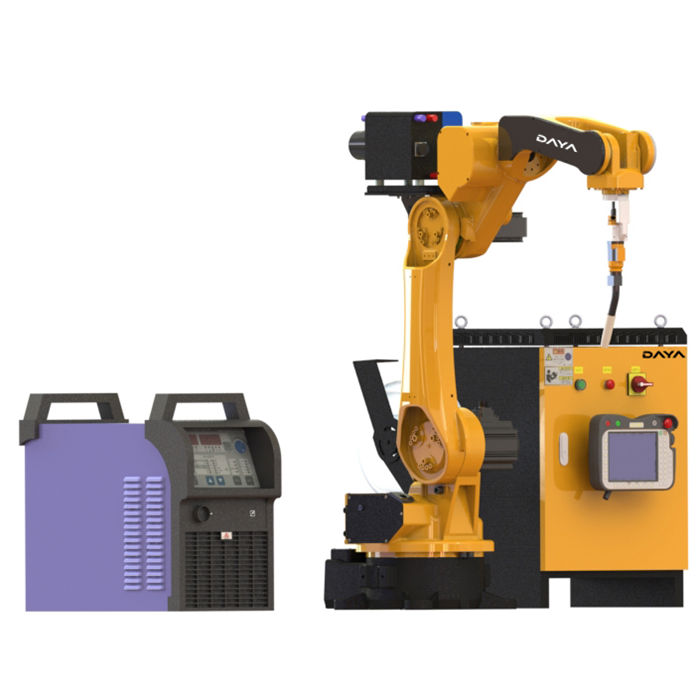

ربات جوشکاری

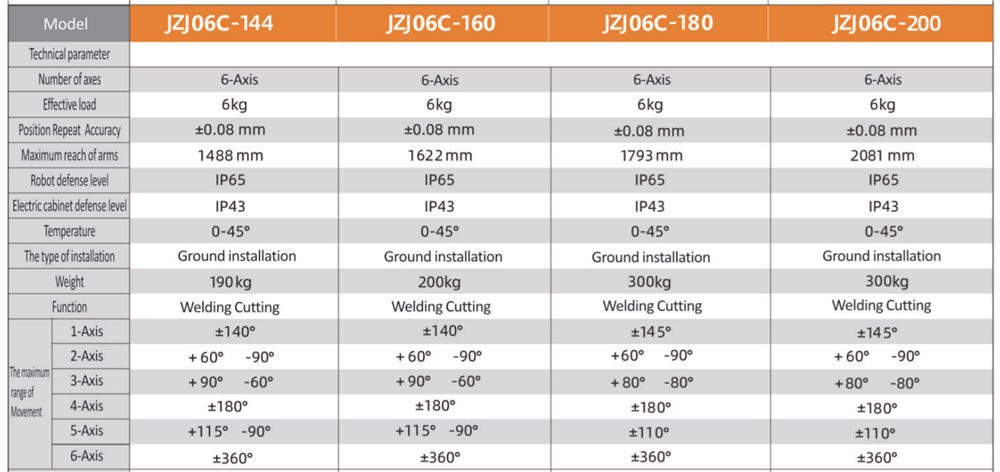
سری ربات جوش JZJ06C-180
سری ربات جوش JZJ06C-144

سری ربات جوش JZJ06C-160

سری ربات جوش JZJ06C-200
معرفی مختصر
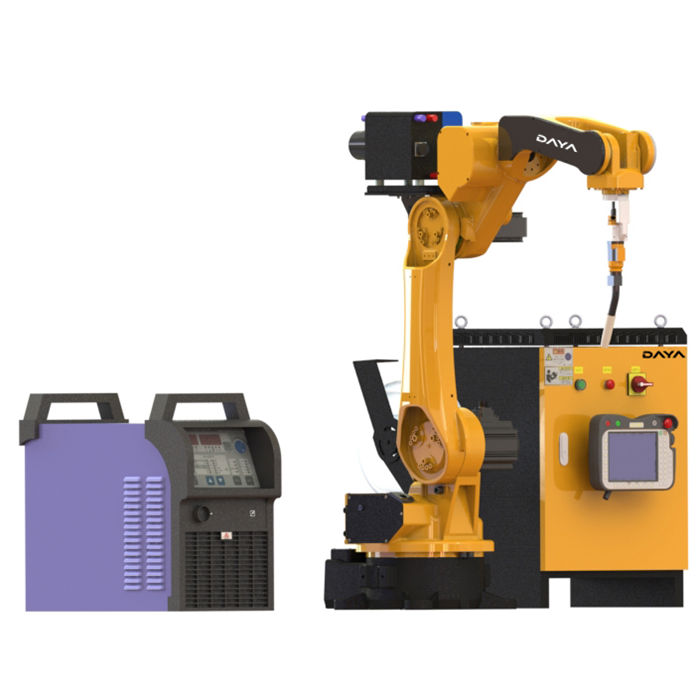
ربات جوشکاری یک ربات صنعتی است که در زمینه جوشکاری (از جمله برش و پاشش) فعالیت دارد. طبق تعریف سازمان بین المللی استاندارد سازی (ISO) مبنی بر اینکه ربات صنعتی به ربات جوشکاری استاندارد تعلق دارد ، ربات صنعتی یک دستیار قابل برنامه ریزی چند منظوره و قابل تکرار با سه یا چند محور قابل برنامه ریزی است که در زمینه اتوماسیون صنعتی مورد استفاده قرار می گیرد. به منظور انطباق با کاربردهای مختلف ، رابط مکانیکی آخرین محور ربات معمولاً یک فلنج اتصال است که می تواند با ابزارهای مختلف یا اثرات نهایی متصل شود. ربات جوشکاری نصب انبر جوشکاری یا تفنگ جوشکاری (برش) بر روی فلنج شافت انتهایی ربات صنعتی است ، به طوری که بتواند جوشکاری ، برش یا پاشش حرارتی را انجام دهد.
جوشکاری ربات استفاده از ابزار مکانیزه قابل برنامه ریزی (روبات) است که هم با انجام جوشکاری و هم با کار با قطعه ، فرآیند جوشکاری را کاملاً خودکار می کند. فرآیندهایی مانند جوشکاری قوس فلز گاز ، اگرچه اغلب خودکار هستند ، اما لزوماً معادل جوشکاری ربات نیستند ، زیرا یک اپراتور انسانی گاهی اوقات مواد را برای جوشکاری آماده می کند. جوشکاری ربات معمولاً برای جوشکاری نقطه ای مقاومتی و جوشکاری قوس در کاربردهای تولید بالا ، مانند صنعت خودرو استفاده می شود.
جوشکاری روبات کاربرد نسبتاً جدیدی در زمینه رباتیک است ، حتی اگر اولین بار در دهه 1960 ربات ها به صنعت ایالات متحده وارد شدند. استفاده از روبات در جوشکاری تا سال 1980 موفقیت آمیز نبود ، زمانی که صنعت خودرو شروع به استفاده گسترده از روبات ها برای جوشکاری نقطه ای کرد. از آن زمان ، هم تعداد ربات های مورد استفاده در صنعت و هم تعداد کاربردهای آنها بسیار افزایش یافته است. در سال 2005 ، بیش از 120،000 ربات در صنعت آمریکای شمالی مورد استفاده قرار گرفتند که تقریبا نیمی از آنها برای جوشکاری بودند. [1] رشد در درجه اول با هزینه های بالای تجهیزات ، و محدودیت حاصل از آن برای برنامه های تولید بالا محدود می شود.
جوشکاری قوس ربات به تازگی رشد سریع خود را آغاز کرده است و در حال حاضر حدود 20٪ از برنامه های ربات صنعتی را کنترل می کند. اجزای اصلی ربات های جوشکاری قوس الکتریکی ، دستکاری یا واحد مکانیکی و کنترل کننده هستند که به عنوان "مغز" ربات عمل می کنند. دستکاری همان چیزی است که باعث حرکت ربات می شود و طراحی این سیستم ها را می توان در چندین نوع متداول مانند SCARA و ربات مختصر دکارتی دسته بندی کرد که از سیستم های مختصات مختلف برای هدایت بازوهای دستگاه استفاده می کنند.
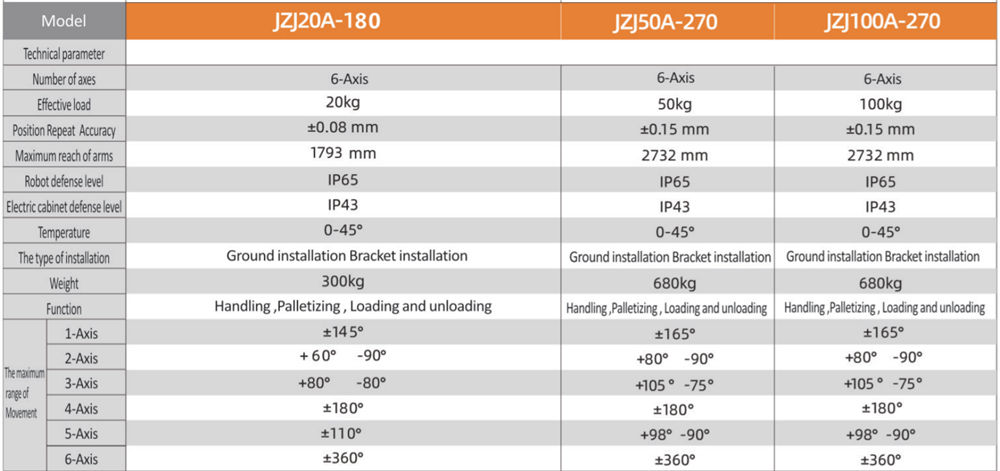
پارامترهای فنی سری جوشکاری ربات ها